Aracımız

Mekanik Sistemimiz
Araç tasarımı yapılırken özgünlük, üretilebilirlik ve işlevsellik temelinde ilerlenmiştir. Klasik AUV tasarımlarının aksine, kabuk tek parça entegre yapı olarak hem şasi hem de sızdırmaz gövde işlevi görmektedir. Topoloji optimizasyonu ile kalınlığı değişen (4-7 mm) PA12 kabuk, SLS yöntemiyle üretilmiş, hafiflik, dayanıklılık ve sızdırmazlık kriterleri optimize edilmiştir. Toplam araç boyutları 600 × 600 × 440 mm olup kütle-hacim oranı, yaklaşık %1,4 pozitif yüzerlik payı bırakacak şekilde ayarlanmıştır; böylece araç su altında hafifçe yukarı yönlü kuvvetle dengede kalır.
Aracımız beş ana bölümden oluşur: 1) Kabuk, 2) Torpido, 3) Grabber, 4) Marker Dropper ve 5) Batırma Sistemi.
Kabuk Tasarımı
Klasik AUV anlayışından farklı olarak, aracın kabuğu hem şasi hem de sızdırmaz tüp görevini üstlenir. Vatoz ve köpek balıklarından ilham alan kabuk, 600 × 600 × 240 mm boyutlarında olup SLM yöntemiyle AlSi10Mg malzemesinden üretilip simetrik bir şekilde tasarlanmıştır. Aracın ağırlık merkezi ve hacim merkezi aynı noktadır. Bu sayede kaldırma kuvveti sonucu oluşacak statik denge sorunları minimize edilmiştir. Duvar kalınlığı 4-7 mm arasında değişir. Üst kapak yarım silindir formundadır ve güçlendirilmiş cam içeren özel bir flanşla sabitlenir.
Sızdırmazlık, O-ring ve sualtı montaj yapıştırıcısıyla sağlanır. Kablo geçişleri IP68 sertifikalı SubConn konnektörlerle gerçekleştirilir. Kabuk içi düzenleyici yapılar, 70 °C’ye dayanıklı PA12’den imal edilerek elektronik bileşenlerin yerleşimini kolaylaştırıldı. Dış yüzey, mavi-gri tonlarında çevre dostu epoksi kaplama ile korunuyor.
.png)
Modüler Sistem
Geliştirmekte olduğumuz su altı aracı, farklı yarışmaların ve görevlerin değişken gereksinimlerine uyum sağlayabilmesi amacıyla modüler bir yapıda tasarlanmıştır. Aracın alt kısmına ve üstüne entegre edilecek bağlantı sistemleri sayesinde marker dropper ve torpido donanımları araca zarar vermeden ve araç geometrisine uyumlu şekilde bağlanabilecektir.Bu yapı, her yarışmanın farklı teknik isterlerine uygun çözümler sunarak aracımızın esnekliğini ve işlevselliğini artırmayı hedeflemektedir.
Örneğin, RoboSub Yarışması gibi platformlarda işaret bırakma (marker dropper) ve torpido fırlatma (torpedo) gibi görevler olması sebebiyle enteğre bağlantı sistemleri kullanılacaktır. Buna karşılık, TEKNOFEST İnsansız Su Altı Aracı Yarışmasının görevleri arasında işaret bırakma ve torpido fırlatma olmadığı için aracımız bu yarışmaya enteğre bağlantı sistemleri olmadan katılacaktır.
Enteğre bağlantı sistemleri araca konumlandırılırken kameraların, sensörlerin ve diğer sabit komponentlerin konumu da dikkate alınmıştır. Böylece araca sonradan entegre edilen sistemler sensörlerin ve kameraların görüş alanını engellemeden görevlerini yerine getirebilecektir. Özetlemek gerekirse bu modüler yaklaşım yeni görev sistemlerinin araca kolayca eklenmesine olanak tanırken, bakım ve geliştirme süreçlerini de önemli ölçüde kolaylaştıracak.
.png)
.png)
.png)
.png)
_edited.png)
_edited.png)
Torpido Sistemi
RoboSub yarışması için geliştirilen torpido sistemi, yaylı fırlatma mekanizmasıyla çalışır. Sistem; yaklaşık 4 cm çapında, 10 cm uzunluğunda hidrodinamik olarak tasarlanmış iki mermiden ve bu mermileri fırlatacak mekanizmadan oluşmaktadır.
Pnömatik ve elektromanyetik çözümleri, ek hacim, sızdırmazlık ve kontrol zorlukları nedeniyle elenmiştir; onun yerine az yer kaplayan, güvenilir ve düşük maliyetli yaylı sistem tercih edilmiştir.
Step motorun döndürdüğü rack-&-pinion düzeneği yayı kontrollü biçimde serbest bırakır ve mermiyi ray üzerinde iter. Çift hazneli yapı, iki atışı arka arkaya yapabilmeye olanak sağlar. Mermilerin, su içinde dönmeden ilerleyebilmeleri için arkaları kanatlı tasarlanıp raylı sisteme sabitlenmiştir. Atış sırasında mermiyi yerinde tutan küçük yaylar yana açılarak merminin çıkmasına izin verir.
Kompakt tasarımı sayesinde sistem, üst kapağa entegre edilen özel bir aparat aracılığıyla araca sabitlenir. Güvenli, verimli ve kolay üretilebilir olması sebebiyle yarışma isterlerine tam uyum sağlar.

Grabber Sistemi
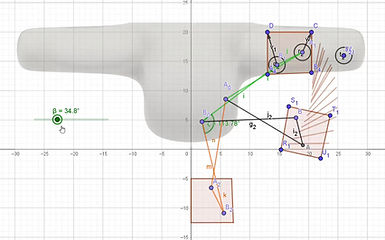
Nesne tutma görevleri için aracın her iki kanadına simetrik olarak gömülü bir tutucu sistemi tasarlanmıştır. Tutucular, four-bar mekanizmasına sahiptir ve görev anında senkronize bir şekilde dışarı doğru açılıp aracın altına inerek nesneyi kavrar.
Tutucunun baş kısmını motora bağlayan link mekanizmasına GeoGebra yardımıyla kinematik sentez yapılmıştır ve aracın kabuk yapısına özel olarak tasarlanmıştır. Nesneyi kavrayacak kısım (tutucunun baş kısmı) için küçük yaylarla pinli bir sistem tasarlanmıştır. Her bir pinin üzeri kauçuk malzeme ile kaplanmıştır. Bu sistem tuttuğu nesnenin şeklini alarak güçlü bir kavrama sağlamaktadır. Tutucu özgün ve işlevsel tasarımıyla görevleri başarıyla yerine getirir.

_edited.png)
Marker Dropper Sistemi
Marker Dropper, 160 mm çapında olup 60 mm yüksekliğinde silindirik bir gövdeye sahiptir ve 38 mm çapında iki marker taşır. Sistemde döner bir disk ve servo motor yer alır. Her 90 derecelik dönüşte bir marker bırakılır.
Motor, sızdırmaz rulman ve O-ring destekli hazne içinde çalışır. Bu sistem hem yerden tasarruf sağlar hem de markerların sırayla bırakılmasını garanti eder.

.png)
Batırma ve Yüzdürme Sistemi
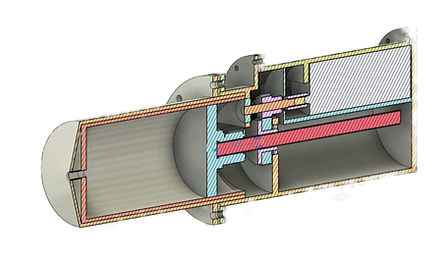
Su altı araçlarında en kritik sistemlerden biri olan batırma ve yüzdürme mekanizması, aracın görev derinliğine inmesini ve gerektiğinde yüzeye çıkmasını sağlar. Bu sistem, Arşimet prensibi esas alınarak tasarlanmış olup kaldırma kuvveti ile aracın batması/yüzmesi kontrol altına alınmıştır.
Tasarım sürecinde, denizaltılarda yaygın olarak kullanılan vana mekanizmalı safra tankları ve basınçlı gaz odaları incelenmiştir. Ancak bu sistemlerin ekstra hacim ihtiyacı, karmaşık yapısı ve sızdırmazlık sorunları nedeniyle, bu çözümler yerine daha basit, güvenilir ve kompakt bir sistem olan şırınga temelli piston–mil mekanizması tercih edilmiştir.
Sistem, araç gövdesi dışında yer alan özel bir sızdırmaz kabuk içerisine entegre edilmiş; step motor, vidalı mil, piston, ve şırınga haznesinden oluşmaktadır. Motorun döndürdüğü vidalı mil, pistonu doğrusal olarak hareket ettirir. Bu hareket, şırınga içerisinde basınç farkı oluşturarak dış ortamdan su alınmasını veya suyun dışarı atılmasını sağlar. Böylece sistem, herhangi bir itici kullanmadan, yalnızca bu mekanik hareketle aracın dalmasını veya yükselmesini mümkün kılar.
Sistemin temel bileşenleri:
-
Çapı 7 cm, uzunluğu 19 cm olan 500 mL kapasiteli şırınga haznesi,
-
15 cm uzunluğunda vidalı mil,
-
Sızdırmaz conta destekli ön ve arka kabuk,
-
Mil ve motorun sabitlenmesini sağlayan özel parçalar,
-
Su tahliyesine uygun geçiş açıklıklarıdır.
Dış kabuk, 35 cm uzunluğunda ve 9 cm çapında olacak şekilde silindirik biçimde tasarlanmıştır. Arka kapağın açılır–kapanır yapısı sayesinde, bakım ve montaj kolaylığı sağlanmıştır. Kablo geçişleri için IP68 sertifikalı su geçirmez konnektörler kullanılmıştır.
Araçta, bu sistemin iki adet simetrik versiyonu yer almakta olup, batma ve yüzdürme işlemleri dengeli bir şekilde gerçekleştirilir. Gövdeye destek milleri aracılığıyla monte edilen silindirler, 70 derece dönecek şekilde konumlandırılmış ve kanat altında konumlandırılmıştır.
Bu sistem, dış ortamdan aldığı suyu tekrar doğrudan dışarı vererek çalışır. Hiçbir kimyasal veya yağlı sıvı kullanılmaz, bu da sistemi tamamen çevre dostu ve sızıntı riski olmayan bir çözüm haline getirir.

Analizler
Bu çalışma, bir su altı otonom aracının dış akış probleminin sayısal çözümünü ele almaktadır. CFD analizleri, aracın düşük hızlardaki hidrodinamik davranışlarını incelemek ve tasarım performansını değerlendirmek amacıyla gerçekleştirilmiştir. Analizler, aracın çevresindeki akış desenleri, hız dağılımları ve türbülans etkilerini inceleyerek aracın tasarımını optimize etmek için kritik veriler sağlamaktadır. 0.5 m/s ve 1.88 m/s hızlarında yapılan simülasyonlar, aracın performansını farklı hızlarda değerlendirmek amacıyla yapılmıştır.
Analizlerde kullanılan ağ yapısı yaklaşık 4.6 milyon nod, 13.2 milyon yüzey ve 4.3 milyon elemandan oluşan polyhedral bir yapıdan oluşmaktadır. Bu yapı, çözüm doğruluğunu artırmak ve hesaplama verimliliğini sağlamak amacıyla seçilmiştir. Yüksek türbülanslı bölgelerin daha hassas çözülmesi için aracın yüzeyi ve çevresine yoğun ağ yapısı uygulanmış, böylece sınır tabaka davranışları daha doğru şekilde modellenmiştir.
Simülasyonlar steady-state (kararlı hâl) rejiminde gerçekleştirilmiş ve kullanılan türbülans modeli, RANS tabanlı SST k-ω modeli olmuştur. Bu model, özellikle sınır tabaka ayrılmalarını daha iyi tahmin edebilmesi nedeniyle su altı uygulamalarında yaygın olarak tercih edilmektedir. Çözümde pressure-based yaklaşımı kullanılmış ve çıkış sınır koşulu olarak statik basınç belirlenmiştir. Sayısal çözümde yakınsama (convergence) kriteri olarak 10⁻⁶ eşiği uygulanmıştır.
Analizler iki farklı hızda gerçekleştirilmiştir. İlk hız olan 0.5 m/s için sonuçlar, 20 metre derinlikteki su basıncı dahil edilmeden çözülmüş ve manuel düzeltmelerle düzeltilmiştir. İkinci hız olan 1.88 m/s için ise su basıncı hesaba katılmadan doğrudan çözüm alınmıştır. Her iki hızda da aracın çevresindeki akış alanları incelenmiş ve türbülansın etkileri gözlemlenmiştir.

Analiz için atılan mesh.

0.5 m/s koşulunda
hız animasyonu

0.5 m/s koşulunda
basınç animasyonu
1.88 m/s koşulunda
hız animasyonu
1.88 m/s koşulunda
basınç animasyonu




Aracımızın Elektriksel Yapısı
Aracın elektronik tasarımı yapılırken modülerlik, üretim kolaylığı ve güvenlik faktörleri üzerine odaklanılmıştır. Analiz ekibinin yaptığı analizler sonucu elde edilen verilerle güç tüketimi hesapları yapılmıştır ve bu hesaplar doğrultusunda güç altyapısı tasarlanmıştır. Tasarım yapılırken satın alınacak parçaların ulaşım kolaylığı önemli bir faktör olmuştur. Tasarımımızın olabildiğince basit ve güvenli olması amaçlanmıştır, bu da aracın bakım-onarımının kolay olmasını ve insan sağlığına zarar verme ihtimalini sıfıra yaklaştırmıştır.
Güç Altyapısı
Otonom su altı aracımızın enerji kaynağını, ikisi 4S 10000 mAh, biri 2S 7400 mAh olmak üzere üç adet lityum-polimer batarya oluşturur. Elektronik bileşenlerin ihtiyaç duyduğu farklı gerilim seviyeleri, çeşitli gerilim regülatörleriyle sağlanmaktadır.
Alt Sistemler
Torpido ve dropper sistemleri birer adet servo motor ile kontrol edilmektedir. Batırma sistemi yüksek torklu redüktörlü motorlar ile çalıştırılmaktadır. Pnömatik tüpler, gripper kullanılacağı zaman her iki tarafta bulunan servo motorlar ile yanlara açılarak araçta gömülü olan gripper sisteminin açılabilmesini mümkün kılar.
Gripper sistemi iki adet servo motor ile kontrol edilip hassas kontrol sağlanmaktadır. Eklenen sensörlerle oluşturulan feed-back döngüleriyle gripperin cismi tutup tutmadığı kontrol edilmektedir.
Tüm alt sistemlerde modülerite arandığı için elektronik sistem de aynı şekilde modüler yapılmıştır. Bu sayede tüm alt sistemler rahatlıkla sökülüp takılabilmektedir, bu sayede alt sistemler izole olarak rahatlıkla test edilebilir.
Güvenlik Sistemi
Sıcaklık, su sızıntısı ve akım sensörleri, aracın hem kendisine hem de çevresine zarar vermesini önleyen kill-switch devresine entegre edilmiştir. Uçuş kartlarına ek olarak eklenecek bir kontrolcü ile aracın güvenliği takip edilecektir. Sızıntı gibi araç için büyük tehdit yaratan durumlarda ana kontrolcülerle iletişim sağlanıp oluşacak krizler önlenmektedir.
Acil durum butonu ile kill-switch devresi tetiklenerek tüm motorların gücü yüksek akıma dayanıklı röleler ile anında kesilebilmektedir, bu sayede aracın hem kendine hem de çevresine acil durumlarda zarar vermesi önlenmektedir.
Aracımızın Yazılım Altyapısı
Su Altı Kontrol Kartı
Pixhawk, Radiolink modeli otopilot sistemi olarak kullanılmış ve harici bir IMU (MPU9250) ile desteklenmiştir. Bu kurulum, su altında stabil hareket ve doğru konum tespiti için optimize edilmiştir. IMU verileri, Raspberry Pi 4B üzerinde çalışan PID destekli kontrol algoritmaları ile işlenmekte, böylece iticilere gönderilen sinyaller gerçek zamanlı olarak ayarlanabilmektedir. Bu yapı sayesinde aracımız altı eksende (6DOF) kararlı ve hassas manevralar gerçekleştirebilmektedir.

Simülasyon
ROS2 (Humble) tabanlı bir sistem mimarisi kurulmuş ve Gazebo Harmonic simülasyon ortamı ile entegre edilmiştir. Bu ortam, “bluerov2_gz” paketi ile özelleştirilmiş, altı eksende fiziksel koşulların simülasyonu sağlanmıştır. ArduSub SITL entegrasyonu ile gerçek uçuş kontrol yazılımı test edilmekte, Rviz2 ile de simülasyon verileri görselleştirilmektedir. Ayrıca, görev algoritmaları ve konumlama sistemleri bu ortamda test edilerek önceden doğrulanmaktadır.

Yazılım Mimarisi
Geliştirdiğimiz otonom aracın yazılım altyapısı, yüksek güvenilirlik ve performans odaklı olarak Python ve C++ programlama dilleriyle inşa edilmiştir. Sistem, görevlerini donanımsal olarak iki ana işlemci kartı üzerinden yürütmektedir:
-
NVIDIA Jetson Orin NX: Görüntü işleme ve yapay zekâ temelli görevleri üstlenmektedir.
-
Raspberry Pi 4B: Sensör verileri, motor kontrolü ve diğer genel kontrol işlemlerinden sorumludur.
Bu iki işlemci kartı arasında yüksek hızlı ve stabil veri aktarımı için Ethernet bağlantısı kurulmuş, iletişim ise ROS2 (Robot Operating System 2) altyapısı ile sağlanmıştır. ROS2 topikleri üzerinden iki işlemci arasında gerçek zamanlı veri paylaşımı gerçekleştirilmekte, sistemler arası senkronizasyon sorunsuz bir şekilde yürütülmektedir.
Jetson Orin NX üzerinde, OpenCV kütüphanesi ile entegre çalışan YOLOv11 tabanlı nesne tanıma algoritması kullanılarak çevre algılama yapılmakta ve bu sayede görevler dinamik olarak planlanmaktadır.
Araç üzerinde yer alan Pixhawk uçuş kontrol kartı ile haberleşme, pymavlink protokolü üzerinden gerçekleştirilmekte; hareket komutları, görev başlatma ve sensör verisi alma işlemleri bu yapı üzerinden yönetilmektedir.
Sistem genelinde entegrasyon BlueOS platformu ile tamamlanmış olup, yazılımın sürüm yönetimi, dağıtımı ve çoklu geliştirme ortamlarında güvenli biçimde çalıştırılması amacıyla Git versiyon kontrol sistemi ve Docker konteyner teknolojileri kullanılmaktadır.
Geliştirilen tüm yazılım bileşenleri, açık kaynaklı olarak GitHub platformundaki resmi havuzumuzda topluluğun erişimine sunulmuştur.
Aracın çevresel farkındalığını artırmak ve görev başarımını optimize etmek amacıyla sistem üzerine hem mono hem de stereo kameralar entegre edilmiştir. Bu kameralar, aşağıdaki görevleri desteklemektedir:
-
Gerçek zamanlı nesne tanıma
-
Görüntü işleme
-
Eşzamanlı yerelleştirme ve haritalama (SLAM)
Ayrıca, zorlu çevre koşullarında görüntü kalitesini artırmak ve nesne tanıma algoritmasının performansını iyileştirmek amacıyla araç üzerine özel aydınlatma donanımı entegre edilmiştir. Bu sayede düşük ışıklı veya bulanık ortamlarda dahi görev etkinliği korunmaktadır.
Sistemle etkileşim sağlayacak operatörler için, kullanıcı dostu ve işlevsel bir arayüz tasarlanmıştır. PyQt5 kütüphanesi ve Qt Designer araçları kullanılarak geliştirilen bu masaüstü uygulama sayesinde:
-
Araç motor kontrolü,
-
Kamera görüntü izleme,
-
Pusula ve sensör verilerine erişim,
-
Temel hareket ve sistem testleri kolayca gerçekleştirilebilmektedir.
Arayüz, uzaktan erişimle çalışabilecek şekilde yapılandırılmıştır. SSH protokolü sayesinde, araç ve yüzey bilgisayarı aynı Wi-Fi ağı üzerinde güvenli bir şekilde haberleşebilmekte ve operatör, aracı uzaktan denetleyebilmektedir.



Algoritma Tasarımı
-
Dalış-Çıkış Sistemi Algoritması: Şırınga sistemi basınç sensörüyle entegre edilerek PID kontrollü bir derinlik sabitleme algoritmasıyla yönetilmektedir.
-
Hareket Kontrolü: Kalman filtresi ile sensör verileri birleştirilerek, PID destekli motor sinyalleri oluşturulmaktadır.
-
Navigasyon: OpenVINS tabanlı görsel-ataletsel odometri (VIO) sistemi kullanılmaktadır. Bu sistem özel olarak eğitilmiş derin öğrenme destekli bir özellik dedektörü ile güçlendirilmiş ve su altı koşullarında %30 doğruluk artışı sağlamıştır.
-
Görev Algoritmaları:
-
Kayıp Hazine Avı: D* Lite algoritması ile rota planlama.
-
Kablo Takibi ve Anomali Tespiti: YOLOv11 ve renk filtreleme kombinasyonu ile hibrit sistem oluşturulmuştur.
-